Catalog excerpts

SmartMove™ Robotized TMS a novel approach to image guided transcranial magnetic stimulation (TMS). The system allows to plan a stimulation session, allowing to define the stimulation sites and the desired coil orientations. While executing the stimulation plan, the robotized TMS system SmartMove places the coil tangentially at the predefined target positions and keeps the coil in place even if the head of the subject moves. The system’s main components are a serial robot arm with six joints and a marker-based optical tracking system. Both devices are linked by a control computer, running the software module, for treatment planning and execution. System Overview The system consists of the following parts: 1. The robot arm, type Adapt Viper S850 with power supply unit and remote control. 2. The control unit and the software for the robot arm, optical tracking system and the TMS device. 3. NDI Spectra® optical tracking system. System components Software Specifications The robot arm, the optical tracking system and the TMS device are operated by the control unit. The software module allows to plan the stimulation treatment, by defining the stimulation targets and the desired coil orientations. The defined target positions for magnetic stimulation are then forwarded to the robotic arm. During the session, any movement of the subject is monitored with the optical tracking system and compensated for. This guarantees optimal positioning of the TMS coil over the pre-defined target. Magnetic stimulation is done when the TMS coil reaches the pre-defined target location. MRI Import • DICOM, Nifti Targets Definition • Single Targets: - Based on real scalp surface, by pointing at scalp with the pointer tool - Based on computer rendered surface of subject and mouse clicks - Based on MRI / CT data and mouse clicks • Automatically generated target grids, width adjustable height, width and target spacing starting from a previously defined single target Subject Registration Anatomical landmarks based and/or ICP based. The ICP is based on surface points automatically collected while moving the pointer over the scalp. Targeting Mode • Static (without movement compensation) • Dynamic (with movement compensation) Stimulation Mode • Manual. Upon target selection, the robot arm places the coil at the defined position. • Automatic. The robot arm places the coil at all defined target positions: - In the specified order - Randomly Export of stimulated positions Dynamic response latency Relative accuracy (static target) In-session-repeatability (static target) Inter-session-repeatability (static target)
Open the catalog to page 1
Hardware Specifications Robotic Arm The Adept Viper arm is a 6-axis robot designed for a multitude of applications. The precision and physical range of the robot makes it ideal for medical applications requiring flexible and accurate positioning and complete control. Reach Environmental Requirements Power Requirements for Smart Controller Floor / Table / Ceiling Weight (approx.) Work Envelope: Radius 850 mm Dimensions Adept Viper s850 (mm) Work enveloppe of the robotic arm Inner Limit: Radius 166 mm Camera System SmartMove is based on the NDI Spectra™ camera system. This tracking hardware...
Open the catalog to page 2All ANT Neuro catalogs and technical brochures
-
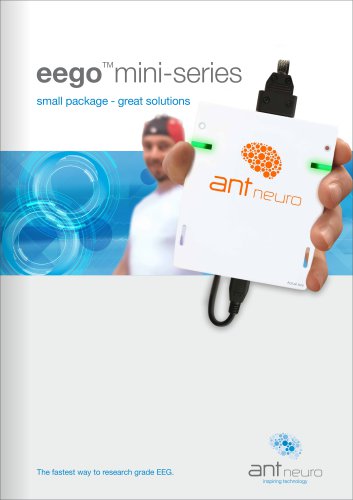
 eego™24 brochure
eego™24 brochure3 Pages
-
 waveguard™net brochure
waveguard™net brochure3 Pages
-
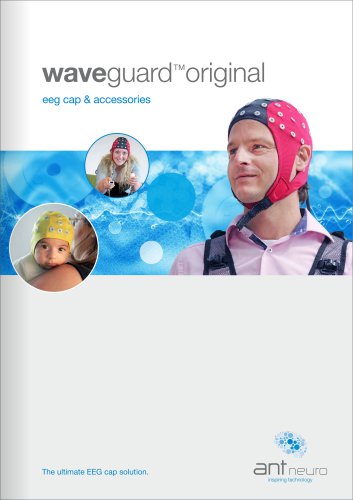 waveguard™original brochure
waveguard™original brochure7 Pages
-
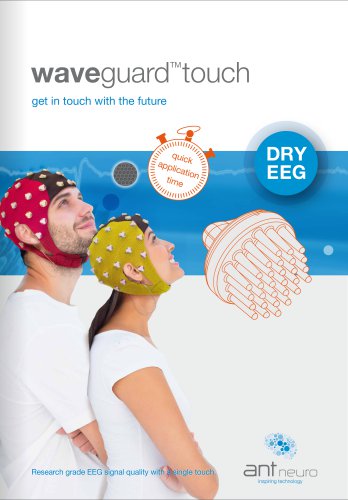 waveguard™touch brochure
waveguard™touch brochure3 Pages
-
 waveguard™connect brochure
waveguard™connect brochure2 Pages
-
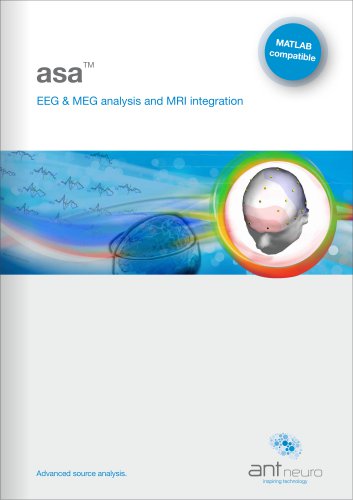 asa™ brochure
asa™ brochure3 Pages
-
 xensor™ brochure
xensor™ brochure3 Pages
-
 smartmove™ brochure
smartmove™ brochure3 Pages
-
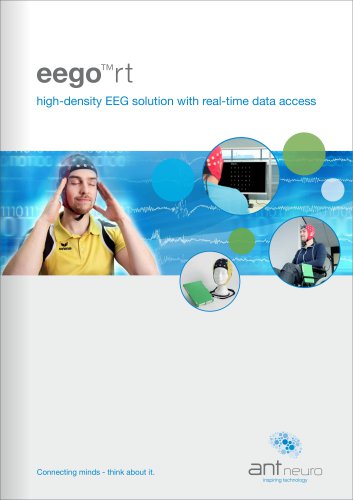 eego™rt brochure
eego™rt brochure3 Pages
-
 eego™8 brochure
eego™8 brochure3 Pages
-
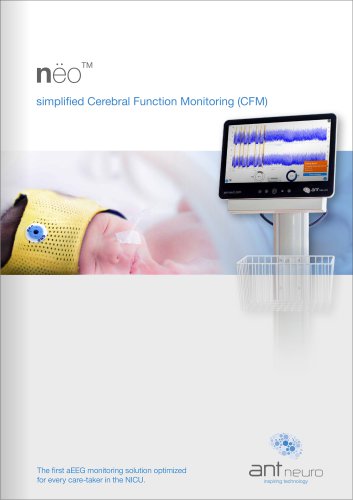 nëo™ brochure
nëo™ brochure3 Pages
-
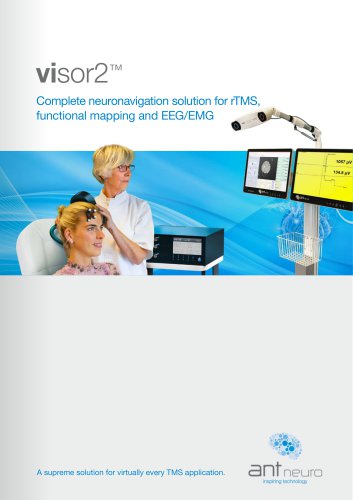 visor2™ brochure
visor2™ brochure3 Pages
-
 eego™sports brochure
eego™sports brochure3 Pages
-
 eego™mylab brochure
eego™mylab brochure3 Pages
-
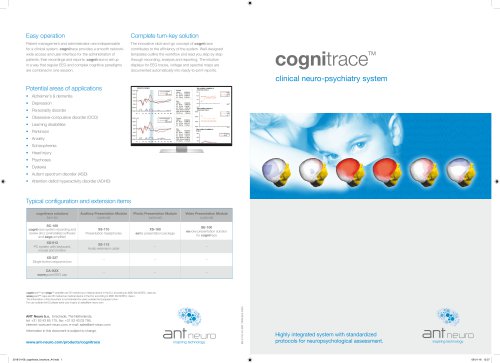 cognitrace™ brochure
cognitrace™ brochure2 Pages